안녕하세요.
오늘은 대형 언어 모델을 이용해 3D 공간을 이해하고 표현하는 혁신적인 기술인 SpatialLM에 대해 소개드립니다. 복잡한 3D 데이터를 손쉽게 구조화하고 분석할 수 있도록 도와주는 이 기술은 로봇 공학, 자율주행, 건축 설계 등 다양한 분야에서 활용될 수 있습니다.
SpatialLM이란 무엇인가?
✨ 공간 이해를 위한 새로운 접근 방식
SpatialLM은 대형 언어 모델(LLM)을 기반으로 3D 공간을 구조적으로 이해할 수 있게 설계된 인공지능 기술입니다. 기존의 3D 데이터는 매우 복잡하고 비정형적인 경우가 많아 처리하기 어렵지만, SpatialLM은 이를 언어처럼 구조화된 정보로 바꾸어 해석할 수 있게 만듭니다.
⚡ 기존 기술과의 차별점
기존 3D 인식 기술은 고가의 장비(LiDAR, 특수 카메라 등)를 요구하거나, 데이터 전처리와 학습 과정이 복잡했습니다. SpatialLM은 일반 RGB 영상이나 간단한 센서 데이터만으로도 고도화된 공간 인식이 가능하다는 점에서 매우 큰 장점을 가집니다.
기술 개요: MASt3R-SLAM과 LLM 기반 파이프라인
🎥 단안 영상에서 포인트 클라우드 추출
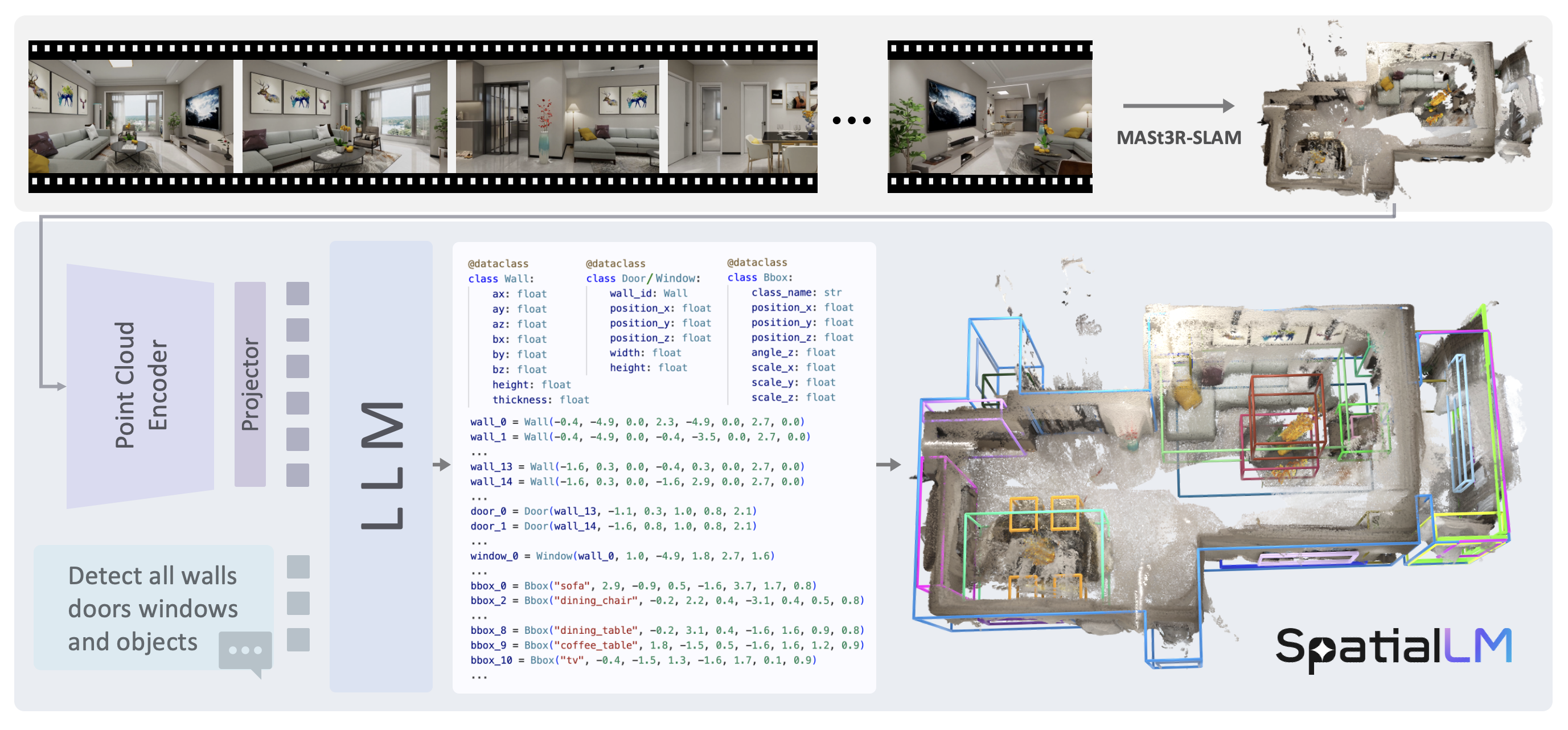
SpatialLM은 일반적인 RGB 영상(단안 비디오)을 입력으로 받아, MASt3R-SLAM 기술을 활용해 3D 포인트 클라우드를 생성합니다. 이 과정은 마치 영상 속 장면을 입체적으로 재현하는 것과 같습니다.
🧠 포인트 클라우드 인코딩과 장면 구조 생성
생성된 포인트 클라우드는 인코더를 통해 압축된 표현으로 변환됩니다. 이후, 대형 언어 모델이 이를 기반으로 공간의 구조(예: 벽, 창문, 문, 가구 위치 등)를 코드로 설명하고, 다시 3D 구조화된 출력으로 재생성합니다.
입력 및 출력 포맷의 다양성

📸 지원되는 입력 소스: 영상, RGBD, LiDAR
SpatialLM은 매우 다양한 형태의 3D 입력 데이터를 처리할 수 있습니다. 일반 카메라로 촬영된 단안 영상, 깊이 정보가 포함된 RGBD 이미지, 그리고 LiDAR 센서 데이터까지 모두 호환됩니다.
📐 출력 형식: 3D 박스, 평면도, IFC 등
이 시스템은 3D 객체의 방향성 바운딩 박스(Oriented Bounding Box), 2D 평면도, 그리고 건축 업계에서 널리 사용하는 IFC(Industry Foundation Classes)와 같은 포맷으로 결과를 출력할 수 있습니다.
학습 데이터셋 및 일반화 능력
🖼️ 포토리얼리즘 기반 대규모 학습
SpatialLM은 사실적인 구조를 반영한 대규모 포토리얼리즘 데이터셋으로 훈련되어 있습니다. 벽, 가구, 공간 구성이 현실 세계와 유사하게 설계되어 학습의 품질이 매우 높습니다.
🌍 현실적인 공간 배치와 물리적 정확성
학습 데이터는 실제 건축 구조를 바탕으로 구성되며, 물리적으로 정확한 객체 배치가 반영됩니다. 이로 인해 실제 환경에 적용했을 때 일반화 성능이 뛰어납니다.
주요 활용 사례
🤖 자율 로봇 및 공간 인식 에이전트
로봇이 자율적으로 공간을 인식하고 이동하거나, 특정 물체를 찾는 데 SpatialLM을 활용할 수 있습니다. 이는 자율주행차, 물류 로봇, 실내 네비게이션 로봇 등에 이상적입니다.
🏗️ 건축 설계, 도시계획, AR/VR 등
건축가는 SpatialLM을 이용해 실제 환경을 기반으로 빠르게 평면도를 생성하거나 구조를 재설계할 수 있습니다. 또한 AR/VR 콘텐츠 제작에도 매우 유용하게 활용될 수 있습니다.
Semantic 및 구조적 장면 출력 기능
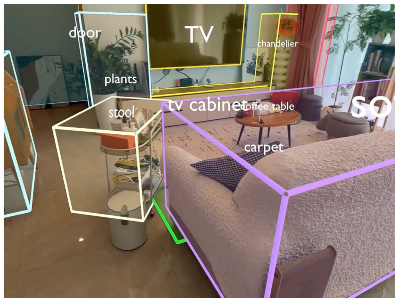
🔍 객체 인식 및 의미 태그
SpatialLM은 벽, 문, 창문, 의자, 책상 등 다양한 객체를 구분하고, 각 객체에 의미 있는 태그(semantic tag)를 자동으로 부여합니다.
🏠 2D/3D 구조 자동화 생성
언어 모델이 생성한 구조 코드를 통해 공간 전체의 3D 구조가 자동 생성됩니다. 이는 수동 설계와 비교했을 때 훨씬 빠르고 정밀합니다.
SpatialLM의 장점과 경쟁력
💸 전용 장비 불필요
일반 카메라로 촬영된 영상만으로도 고급 공간 인식이 가능하여, 고가의 하드웨어 없이도 다양한 응용이 가능합니다.
🧩 멀티모달 처리 및 고차원 추론
다양한 센서 데이터 입력을 동시에 활용할 수 있으며, 단순한 위치 정보 이상으로 의미 기반 공간 추론이 가능합니다.
🔧 워크플로우 통합의 유연성
다양한 플랫폼과 포맷을 지원하므로, 기존 워크플로우에 손쉽게 통합할 수 있습니다. 예: CAD, BIM 소프트웨어, 로봇 제어 시스템 등
미래 확장 가능성과 연구 방향
🤝 인간-로봇 상호작용
SpatialLM은 향후 사람과 자연스럽게 대화하며 공간을 설명하거나 협력하는 로봇 시스템으로 발전할 수 있습니다.
🚀 지능형 에이전트로의 진화
단순한 장면 분석을 넘어서, 실제 환경에서 판단하고 행동할 수 있는 공간 인식 기반 AI로 확장될 가능성이 큽니다.
기술적 한계와 개선 가능성
⏱️ 복잡한 장면 처리에서의 과제
매우 복잡한 실내 구조나 실시간 처리가 필요한 상황에서는 여전히 개선의 여지가 있습니다.
⚙️ 성능 최적화 필요성
대형 언어 모델 기반 시스템 특성상 연산 자원이 많이 필요하므로, 효율적인 최적화 연구가 진행되고 있습니다.
학문적 및 산업적 영향
📚 연구 기여 및 인용
SpatialLM은 학계에서도 큰 주목을 받고 있으며, 구조화된 공간 인식 연구의 새로운 지평을 열고 있습니다.
🏗️ 표준화에 기여하는 잠재력
건축, 엔지니어링, 건설 산업에서 통용되는 IFC 표준을 지원함으로써 산업적 활용성도 매우 높습니다.
결론: SpatialLM의 의미와 미래
🔍 기술 요약 및 핵심 가치
SpatialLM은 복잡한 3D 공간을 언어처럼 해석하고 구조화하는 혁신 기술로, 다양한 분야에 적용될 수 있는 강력한 가능성을 가지고 있습니다.
🌟 공간 이해의 새로운 시대를 여는 열쇠
앞으로의 스마트 기술, 자율 시스템, AR/VR 환경에서 SpatialLM은 핵심 역할을 수행하게 될 것입니다.
출처
https://manycore-research.github.io/SpatialLM/
SpatialLM: Large Language Model for Spatial Understanding
SpatialLM is a 3D large language model designed to process 3D point cloud data and generate structured 3D scene understanding outputs. These outputs include architectural elements like walls, doors, windows, and oriented object bounding boxes with their se
manycore-research.github.io
'AI 오픈소스' 카테고리의 다른 글
| 텐센트 Hunyuan-T1: Mamba 기반 초대형 AI 추론 모델 (0) | 2025.03.23 |
|---|---|
| Unity MCP로 LLM을 연결하여 개발 생산성 높이기 (0) | 2025.03.23 |
| Lightpanda 브라우저: AI 자동화와 웹 스크래핑을 위한 궁극의 헤드리스 브라우저 (1) | 2025.03.22 |
| [AI 오픈소스] NVIDIA Isaac GR00T N1 – 범용 휴머노이드 로봇 인공지능의 미래 (0) | 2025.03.21 |
| [AI 오픈소스] LangManus - 오픈소스 기반 AI 자동화 프레임워크 (0) | 2025.03.21 |



